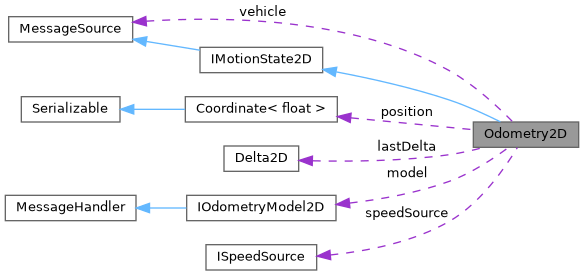
Tracks 2D position and orientation of a robot using velocity and steering data from external sources.
More...
|
|
| Odometry2D (MessageSource &vehicle, ISpeedSource &speedSource, IOdometryModel2D &model) |
| |
| bool | begin (Coordinate< DistanceM > initialPosition, float initialTheta=0.0f) |
| | Initialize the odometry state.
|
| |
| bool | begin (Transform2D transform) |
| |
| bool | begin (const Frame2D &frame) |
| | Initialize the odometry state from a Frame2D.
|
| |
| void | end () |
| |
|
void | update () |
| | Update the odometry state with new speed and steering angle Call this method in your control loop.
|
| |
| Coordinate< DistanceM > | getPosition () const |
| | Get the current 2D position (meters)
|
| |
|
Angle | getSteeringAngle () const |
| | Get the current steering angle (radians or angular velocity)
|
| |
| Angle | getHeading () const |
| | Get the current heading as an Angle (radians)
|
| |
| Speed | getSpeed () const |
| | Get the current speed (meters/second)
|
| |
|
float | getTheta () const |
| | Get the current orientation (radians)
|
| |
|
float | getLinearVelocity () const |
| | Get the current linear velocity (meters/second)
|
| |
|
float | getAngularVelocity () const |
| | Get the current angular velocity (radians/second)
|
| |
|
Distance | getTotalDistance () const |
| | Get the total distance traveled.
|
| |
|
Delta2D | getLastDelta () const |
| | Get the last delta update (dx, dy, dtheta)
|
| |
|
Speed3D | getSpeed3D () const |
| | Get the current speed as a Speed3D (x, y in world frame, z: 0)
|
| |
|
void | setState (Coordinate< DistanceM > pos, float th) |
| | Set the odometry state (position and orientation)
|
| |
|
MotionState3D | getMotionState () const |
| | Get the current motion state as a MotionState3D (with z=0 and pitch/roll=0)
|
| |
| Transform2D | getTransform () const |
| |
| virtual Coordinate< DistanceM > | getPosition () const =0 |
| |
| virtual Angle | getHeading () const =0 |
| |
| virtual Speed | getSpeed () const =0 |
| |
|
virtual Transform2D | getTransform () const =0 |
| |
|
virtual bool | begin (Transform2D transform)=0 |
| |
|
virtual void | end ()=0 |
| |
| void | subscribe (MessageHandler &handler, MessageOrigin origin=MessageOrigin::Undefined, MessageContent content=MessageContent::Undefined) |
| | Subscribe a message handler to this source, with optional filtering.
|
| |
|
void | unsubscribeAll () |
| | Remove all registered message handlers.
|
| |
| void | sendMessage (Message< float > &msg) |
| | Publish a message to all registered handlers.
|
| |
| void | sendMessage (const Message< Coordinate< float > > &msg) |
| | Publish a message to all registered handlers.
|
| |
| void | sendMessage (const Message< GPSCoordinate > &msg) |
| | Publish a message to all registered handlers.
|
| |
|
void | sendMessage (const Message< MotionState3D > &msg) |
| | Overload for MotionState3D messages.
|
| |
Tracks 2D position and orientation of a robot using velocity and steering data from external sources.
This class provides 2D odometry for mobile robots, such as differential drive or Ackermann vehicles. It integrates velocity and steering angle over time to estimate the robot's position (x, y) in meters.
Supported Kinematics
- Differential drive (default model, via steering angle is provided, via IOdometryModel2D)
Inputs
Outputs
- 2D position (x, y) in meters
Coordinate Frame
- All positions are in the robot's local/world frame, with x forward and y left/right.
Update Method
- Call update() in your control loop to update odometry using the latest speed and steering angle.
- Optionally provide delta time, or let the class compute it using millis().
Integration Method
- Uses simple Euler integration for position updates.
Construction
- Construct with references to an IMessageSource (vehicle), an ISpeedSource (e.g., WheelEncoder), and an IOdometryModel2D (kinematics model).
- The vehicle is subscribed to receive messages for speed/throttle/steering updates.
Limitations
- Assumes no wheel slip or drift unless compensated by the speed source.
- Not suitable for holonomic or omnidirectional robots.
- Orientation (theta) is not explicitly tracked in this class.
Example Usage
OdometryModelAckerman model(...);
odom.update();
auto pos = odom.getPosition();
Serial.printf("x=%.2f, y=%.2f\n", pos.x, pos.y);
A generic 3D coordinate class for robotics, navigation, and spatial calculations.
Definition: Coordinate.h:57
Tracks 2D position and orientation of a robot using velocity and steering data from external sources.
Definition: Odometry2D.h:76
Measures wheel rotation and computes per-wheel distance and speed using encoder ticks for mobile robo...
Definition: WheelEncoder.h:69
- Author
- TinyRobotics contributors
- Date
- 2026-03-30
 Public Member Functions inherited from MessageSource
Public Member Functions inherited from MessageSource