Interface for representing the navigation state of a robot in 2D space. More...
#include <MotionState2D.h>
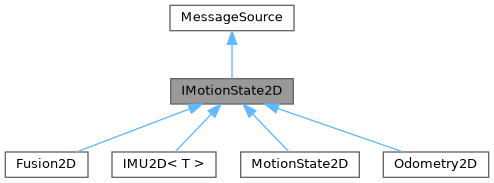
Inheritance diagram for IMotionState2D:
Collaboration diagram for IMotionState2D:
Public Member Functions | |
| virtual Coordinate< DistanceM > | getPosition () const =0 |
| virtual Angle | getHeading () const =0 |
| virtual Speed | getSpeed () const =0 |
| virtual Transform2D | getTransform () const =0 |
| virtual bool | begin (Transform2D transform)=0 |
| virtual void | end ()=0 |
 Public Member Functions inherited from MessageSource Public Member Functions inherited from MessageSource | |
| void | subscribe (MessageHandler &handler, MessageOrigin origin=MessageOrigin::Undefined, MessageContent content=MessageContent::Undefined) |
| Subscribe a message handler to this source, with optional filtering. | |
| void | unsubscribeAll () |
| Remove all registered message handlers. | |
| void | sendMessage (Message< float > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< Coordinate< float > > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< GPSCoordinate > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< MotionState3D > &msg) |
| Overload for MotionState3D messages. | |
Additional Inherited Members | |
| Protected Attributes inherited from MessageSource | |
| std::vector< MessageHandlerEntry > | messageHandlers_ |
Detailed Description
Interface for representing the navigation state of a robot in 2D space.
Provides access to position, heading (orientation), and speed.
Member Function Documentation
◆ getHeading()
|
pure virtual |
Implemented in IMU2D< T >, and Odometry2D.
◆ getPosition()
|
pure virtual |
Implemented in IMU2D< T >, and Odometry2D.
◆ getSpeed()
|
pure virtual |
Implemented in IMU2D< T >, and Odometry2D.
The documentation for this class was generated from the following file:
- src/TinyRobotics/control/MotionState2D.h