Represents a 2D coordinate frame in a hierarchical frame tree. More...
#include <FrameMgr2D.h>
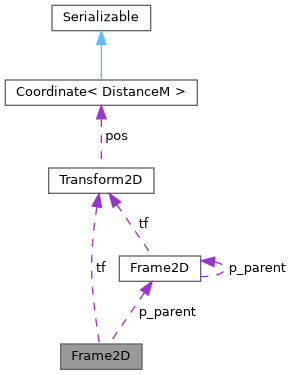
Collaboration diagram for Frame2D:
Public Member Functions | |
| Frame2D (FrameType type, uint8_t idx=0) | |
| Frame2D (FrameType type, uint8_t idx, Frame2D &parent) | |
| Frame2D (FrameType type, uint8_t idx, Frame2D &parent, const Transform2D &tf) | |
| bool | operator== (const Frame2D &o) const |
| FrameType | getType () const |
| uint8_t | getIndex () const |
| const Frame2D * | getParent () const |
| void | setParent (Frame2D &parent) |
| const Transform2D & | getTransform () const |
| Transform2D & | getTransform () |
| void | setTransform (const Transform2D &transform) |
Protected Attributes | |
| FrameType | type |
| uint8_t | index = 0 |
| Frame2D * | p_parent = nullptr |
| Transform2D | tf |
Detailed Description
Represents a 2D coordinate frame in a hierarchical frame tree.
Frame2D models a reference frame in 2D space, such as a robot base, sensor, or world frame. Each frame can have a parent frame, forming a tree structure for managing relative poses. The pose of the frame relative to its parent is described by a Transform2D (translation and heading).
Features:
- Stores frame type and index for identification (e.g., WORLD, BASE, SENSOR).
- Maintains a pointer to its parent frame (if any).
- Stores the SE(2) transform (Transform2D) from this frame to its parent.
- Supports setting and retrieving the transform and parent.
- Used by FrameMgr2D to compute transforms and manage coordinate conversions.
Typical usage:
- Define a hierarchy of frames for a robot (e.g., world → base → sensor).
- Set the transform from each frame to its parent.
- Use with FrameMgr2D to compute transforms between arbitrary frames and convert to GPS.
Example:
Frame2D world(FrameType::WORLD);
Frame2D lidar(FrameType::SENSOR, 0, base, Transform2D(0.2, 0.0, 0));
Represents a 2D rigid body transform (SE(2)): translation and rotation.
Definition: FrameMgr2D.h:42
Represents a 2D coordinate frame in a hierarchical frame tree.
Definition: FrameMgr2D.h:130
The documentation for this struct was generated from the following file:
- src/TinyRobotics/coordinates/FrameMgr2D.h