Modular 2D Simultaneous Localization and Mapping (SLAM) system with flexible map, IMU, and exploration integration. More...
#include <LocalizationAndMapping2D.h>
Inheritance diagram for LocalizationAndMapping2D< T >:
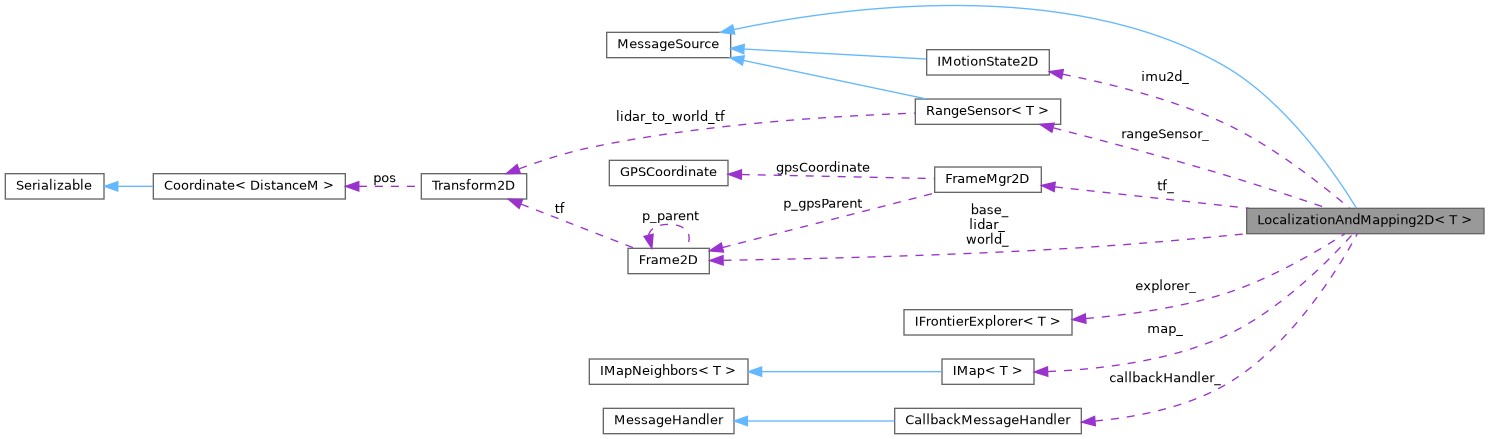
Collaboration diagram for LocalizationAndMapping2D< T >:
Public Member Functions | |
| LocalizationAndMapping2D (IMap< T > &map, IFrontierExplorer< T > &explorer, Frame2D &world, Frame2D &base, Frame2D &lidar, IMotionState2D &imu) | |
| bool | begin () |
| Initialize SLAM system (IMU and range sensor) | |
| void | end () |
| void | addRangeMeasurement (Distance dist, Angle angle, CellState state) |
| Register Range Measurement from Lidar. | |
| void | addRangeMeasurement (float distanceM, float angleDeg, CellState state) |
| Register Range Measurement from Lidar. | |
| bool | getNextFrontier (Coordinate< float > &result) const |
| Find the next frontier cell (boundary between known free and unknown space). | |
| void | subscribe (MessageHandler &handler) |
| Subscribe to imu and range sensor messages. | |
| void | unsubscribeAll () |
| IMap< T > & | getMap () |
| Access to map. | |
| IMotionState2D & | getIMU () |
| Access to IMU state. | |
| IFrontierExplorer< T > & | getFrontierExplorer () |
 Public Member Functions inherited from MessageSource Public Member Functions inherited from MessageSource | |
| void | subscribe (MessageHandler &handler, MessageOrigin origin=MessageOrigin::Undefined, MessageContent content=MessageContent::Undefined) |
| Subscribe a message handler to this source, with optional filtering. | |
| void | unsubscribeAll () |
| Remove all registered message handlers. | |
| void | sendMessage (Message< float > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< Coordinate< float > > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< GPSCoordinate > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< MotionState3D > &msg) |
| Overload for MotionState3D messages. | |
Protected Member Functions | |
| void | markRay (const Coordinate< float > &sensor, const Coordinate< float > &obstacle, CellState state) |
| Mark all cells between the sensor and the obstacle as FREE, and the obstacle cell as OCCUPIED. | |
Static Protected Member Functions | |
| static bool | onIMUPublished (const Message< float > &msg, void *ref) |
Protected Attributes | |
| IFrontierExplorer< T > & | explorer_ |
| RangeSensor< T > | rangeSensor_ |
| IMotionState2D & | imu2d_ |
| IMap< T > & | map_ |
| CallbackMessageHandler | callbackHandler_ |
| Frame2D & | world_ |
| Frame2D & | base_ |
| Frame2D | lidar_ |
| FrameMgr2D | tf_ |
| Protected Attributes inherited from MessageSource | |
| std::vector< MessageHandlerEntry > | messageHandlers_ |
Detailed Description
template<typename T>
class tinyrobotics::LocalizationAndMapping2D< T >
class tinyrobotics::LocalizationAndMapping2D< T >
Modular 2D Simultaneous Localization and Mapping (SLAM) system with flexible map, IMU, and exploration integration.
This class implements a highly modular and extensible 2D SLAM system for occupancy grid mapping, pose estimation, sensor fusion, and autonomous exploration.
Features
- Template Parameters:
T: Scalar type for coordinates and math (default: DistanceM) IFrontierExplorer<T><T>)
- Occupancy Grid Mapping: Maintains a 2D grid map for the environment, supporting any compatible map type via IMap<T>.
- Pose Estimation: Integrates IMU/odometry for robot pose tracking and frame transforms (IMotionState2D).
- Sensor Fusion: Supports range sensors (e.g., Lidar) for obstacle detection and map updates.
- Frontier-Based Exploration: Integrates a flexible frontier explorer for autonomous navigation.
- Frame Management: Uses Frame2D and FrameMgr2D for coordinate transforms between world, base, and sensor frames.
- Flexible Integration: All major components (map, IMU, explorer) are passed by reference for easy swapping and testing.
- Message Bus: Inherits from MessageSource for integration with message-based architectures.
Template Parameters
- Template Parameters
-
T Scalar type for coordinates and math (default: DistanceM) IFrontierExplorer<T> The frontier exploration strategy (default: IFrontierExplorer<T><T>)
Ownership & Lifetime
- All major components (map, IMU, explorer) are passed by reference and must outlive the LocalizationAndMapping2D instance.
Usage Example
GridBitMap map;
IMU2D<float> imu;
Frame2D world, base, lidar;
FrontierExplorer<T> explorer(map);
LocalizationAndMapping2D slam(map, explorer, world, base, lidar, imu);
slam.begin();
// ...
Generic exploration and frontier-based SLAM utility for grid or occupancy maps.
Definition: FrontierExplorer.h:35
A grid map using two bit vectors to represent CellState efficiently.
Definition: GridBitMap.h:30
Modular 2D Simultaneous Localization and Mapping (SLAM) system with flexible map, IMU,...
Definition: LocalizationAndMapping2D.h:61
Represents a 2D coordinate frame in a hierarchical frame tree.
Definition: FrameMgr2D.h:130
Member Function Documentation
◆ getNextFrontier()
|
inline |
Find the next frontier cell (boundary between known free and unknown space).
- Returns
- World coordinates of the next frontier cell, or (0,0) if none found.
◆ markRay()
|
inlineprotected |
Mark all cells between the sensor and the obstacle as FREE, and the obstacle cell as OCCUPIED.
- Parameters
-
sensor_world World coordinates of the sensor obs_world World coordinates of the obstacle
The documentation for this class was generated from the following file:
- src/TinyRobotics/localization/LocalizationAndMapping2D.h