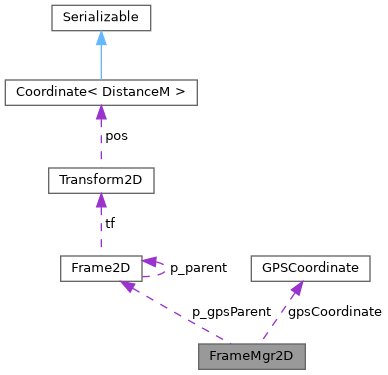
Manages a hierarchy of 2D coordinate frames and enables SE(2) transforms and GPS conversion. More...
#include <FrameMgr2D.h>
Public Member Functions | |
| void | setGPS (Frame2D &parent, const GPSCoordinate gps, float rotationDeg=90) |
| GPSCoordinate | toGPS (const Frame2D &frame) const |
| Converts a local frame to a GPS coordinate. | |
| Transform2D | getTransform (const Frame2D &from, const Frame2D &to) const |
| Computes the transform from one frame to another using SE(2) math. | |
Protected Member Functions | |
| std::vector< const Frame2D * > | getPathToRoot (const Frame2D &frame) const |
| Returns the path from the given frame up to the root (including self). The path is verly small, so no special optimizations are needed. | |
Protected Attributes | |
| Frame2D * | p_gpsParent = nullptr |
| GPSCoordinate | gpsCoordinate |
| float | gpsRotationDeg |
Detailed Description
Manages a hierarchy of 2D coordinate frames and enables SE(2) transforms and GPS conversion.
FrameMgr2D is designed for robotics and navigation applications where multiple coordinate frames (such as world, robot base, and sensors) must be related and transformed. It supports:
- Defining a tree of 2D frames, each with a pose (translation and heading) relative to its parent.
- Computing the SE(2) transform (translation + rotation) between any two frames in the hierarchy.
- Associating a GPS coordinate and orientation with any frame, enabling conversion of local coordinates to global GPS coordinates.
- Converting local frame coordinates to GPS using the reference frame and orientation.
Typical usage:
- Model a robot's world, base, and sensor frames.
- Set the GPS reference for the world or another frame.
- Compute the transform between frames for sensor fusion, mapping, or control.
- Convert robot or sensor positions to GPS for navigation or logging.
Example:
This class is suitable for embedded and desktop robotics systems that require flexible, hierarchical frame management and integration with GPS.
Member Function Documentation
◆ getTransform()
|
inline |
Computes the transform from one frame to another using SE(2) math.
- Parameters
-
from The starting frame. to The target frame.
- Returns
- The composed transform from 'from' to 'to'.
◆ setGPS()
|
inline |
Defines the GPI coordinate for the indicated parent frame. The GPS coordinate is assumed to be facing north (90 degrees) by default, but a different rotation can be specified if needed.
The documentation for this class was generated from the following file:
- src/TinyRobotics/coordinates/FrameMgr2D.h