Tracks 3D position and orientation of a robot using velocity and angular rates. More...
#include <Odometry3D.h>
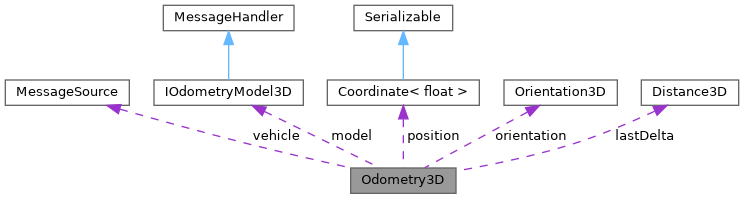
Collaboration diagram for Odometry3D:
Public Member Functions | |
| Odometry3D (MessageSource &vehicle, IOdometryModel3D &model) | |
| bool | begin (Coordinate< float > initialPosition={0, 0, 0}, Orientation3D initialOrientation=Orientation3D()) |
| Initialize the odometry state. | |
| void | update () |
| Update the odometry state with new velocities and angular rates. | |
| Coordinate< float > | getPosition () const |
| Get the current 3D position (meters) | |
| Orientation3D | getOrientation () const |
| Get the current orientation as Orientation3D (yaw, pitch, roll in radians) | |
| Distance | getTotalDistance () const |
| Get the total distance traveled. | |
| Distance3D | getLastDelta () const |
| Get the last delta update (dx, dy, dz) | |
Protected Attributes | |
| MessageSource & | vehicle |
| IOdometryModel3D & | model |
| Coordinate< float > | position |
| Orientation3D | orientation |
| float | totalDistance = 0.0f |
| Distance3D | lastDelta = Distance3D(0.0f, 0.0f, 0.0f, DistanceUnit::M) |
| uint32_t | lastUpdateTimeMs = 0 |
Detailed Description
Tracks 3D position and orientation of a robot using velocity and angular rates.
This class provides simple 3D odometry for mobile robots, such as drones or underwater vehicles. It integrates linear velocity and angular velocity over time to estimate the robot's position (x, y, z) and orientation (yaw, pitch, roll) in meters and radians.
Inputs
- Linear velocity (vx, vy, vz) in m/s (robot frame)
- Angular velocity (wx, wy, wz) in rad/s (robot frame)
- Time delta (in milliseconds, or uses millis() if not provided)
Outputs
- 3D position (x, y, z) in meters
- 3D orientation (yaw, pitch, roll) in radians
Limitations
- Assumes no slip or drift
- Subject to integration drift over time
- Date
- 2026-03-31
Member Function Documentation
◆ begin()
|
inline |
Initialize the odometry state.
- Parameters
-
initialPosition The starting position (x, y, z) in meters. initialOrientation The starting orientation (yaw, pitch, roll) in radians.
- Returns
- true on success
The documentation for this class was generated from the following file:
- src/TinyRobotics/odometry/Odometry3D.h