Abstract interface for 3D odometry models. Provides access to current linear and angular velocities for Odometry3D. More...
#include <IOdometryModel3D.h>
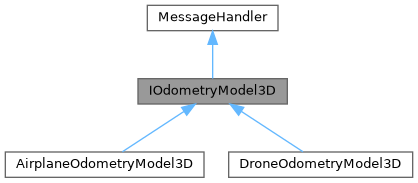
Inheritance diagram for IOdometryModel3D:
Collaboration diagram for IOdometryModel3D:
Public Member Functions | |
| virtual void | registerCallback (void(*callback)(void *), void *userData) |
| Register a callback to be invoked on relevant events (e.g., input change, update). | |
| virtual void | getLinearVelocity (float &vx, float &vy, float &vz) const =0 |
| Get the current linear velocity (vx, vy, vz) in m/s (robot frame). | |
| virtual void | getAngularVelocity (float &wx, float &wy, float &wz) const =0 |
| Get the current angular velocity (wx, wy, wz) in rad/s (robot frame). | |
 Public Member Functions inherited from MessageHandler Public Member Functions inherited from MessageHandler | |
| virtual bool | onMessage (const Message< float > &msg)=0 |
| Handle an incoming message (pure virtual). | |
| virtual bool | onMessage (const Message< Coordinate< float > > &msg) |
| virtual bool | onMessage (const Message< GPSCoordinate > &msg) |
| virtual bool | onMessage (const Message< MotionState3D > &msg) |
Detailed Description
Abstract interface for 3D odometry models. Provides access to current linear and angular velocities for Odometry3D.
Member Function Documentation
◆ getAngularVelocity()
|
pure virtual |
Get the current angular velocity (wx, wy, wz) in rad/s (robot frame).
Implemented in AirplaneOdometryModel3D, and DroneOdometryModel3D.
◆ getLinearVelocity()
|
pure virtual |
Get the current linear velocity (vx, vy, vz) in m/s (robot frame).
Implemented in AirplaneOdometryModel3D, and DroneOdometryModel3D.
◆ registerCallback()
|
inlinevirtual |
Register a callback to be invoked on relevant events (e.g., input change, update).
- Parameters
-
callback Function pointer with signature void callback(void* userData) userData User-provided pointer passed to the callback
Reimplemented in AirplaneOdometryModel3D, and DroneOdometryModel3D.
The documentation for this class was generated from the following file:
- src/TinyRobotics/odometry/IOdometryModel3D.h