Basic 3D IMU dead-reckoning class. More...
#include <IMU3D.h>
Inheritance diagram for IMU3D< T >:
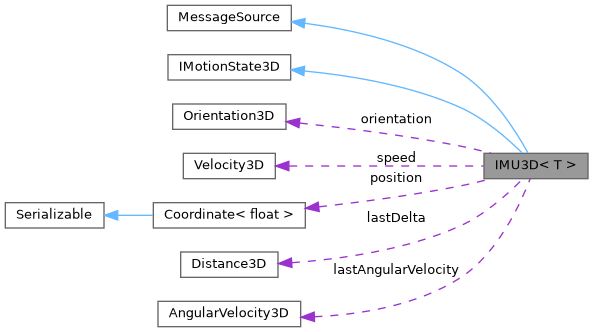
Collaboration diagram for IMU3D< T >:
Public Member Functions | |
| bool | begin (const Coordinate< T > &initialPosition={0, 0, 0}, Orientation3D initialOrientation=Orientation3D()) |
| void | end () |
| void | update (T accelX, T accelY, T accelZ, T gyroX, T gyroY, T gyroZ, unsigned long nowMillis) |
| Distance3D | getLastDelta () const |
| Get the last delta update (dx, dy, dz) | |
| AngularVelocity3D | getLastAngularVelocity () const |
| Get the last angular velocity (rad/s) | |
| Speed3D | getLinearVelocity () const |
| Get the current linear velocity (m/s) | |
| Coordinate< DistanceM > | getPosition () const override |
| Get the current position (IMotionState3D) | |
| Orientation3D | getOrientation () const override |
| Get the current orientation (IMotionState3D) | |
| Speed3D | getSpeed () const override |
| AngularVelocity3D | getAngularVelocity () const override |
 Public Member Functions inherited from MessageSource Public Member Functions inherited from MessageSource | |
| void | subscribe (MessageHandler &handler, MessageOrigin origin=MessageOrigin::Undefined, MessageContent content=MessageContent::Undefined) |
| Subscribe a message handler to this source, with optional filtering. | |
| void | unsubscribeAll () |
| Remove all registered message handlers. | |
| void | sendMessage (Message< float > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< Coordinate< float > > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< GPSCoordinate > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< MotionState3D > &msg) |
| Overload for MotionState3D messages. | |
| virtual Coordinate< DistanceM > | getPosition () const =0 |
| virtual Orientation3D | getOrientation () const =0 |
| virtual Speed3D | getSpeed () const =0 |
| virtual AngularVelocity3D | getAngularVelocity () const =0 |
Protected Member Functions | |
| void | publish () |
Protected Attributes | |
| bool | is_active = false |
| Orientation3D | orientation |
| Speed3D | speed = Speed3D(0.0f, 0.0f, 0.0f, SpeedUnit::MPS) |
| Coordinate< T > | position |
| unsigned long | lastUpdateMillis = 0 |
| Distance3D | lastDelta = Distance3D(0.0f, 0.0f, 0.0f, DistanceUnit::M) |
| AngularVelocity3D | lastAngularVelocity = AngularVelocity3D(0.0f, 0.0f, 0.0f, AngularVelocityUnit::RadPerSec) |
| Protected Attributes inherited from MessageSource | |
| std::vector< MessageHandlerEntry > | messageHandlers_ |
Detailed Description
template<typename T = float>
class tinyrobotics::IMU3D< T >
class tinyrobotics::IMU3D< T >
Basic 3D IMU dead-reckoning class.
This class estimates 3D position, velocity, and orientation (yaw, pitch, roll) for robotics applications by integrating gyroscope and accelerometer data over time.
- Integrates gyro (roll, pitch, yaw rates) to estimate orientation (radians)
- Integrates accelerometer (X, Y, Z) in the robot frame, rotated to world frame, to estimate velocity and position
- All units SI (meters, seconds, radians)
Limitations:
- No sensor fusion with magnetometer or GPS
- No Kalman filter or bias estimation
- Subject to drift over time (no correction)
- Template Parameters
-
T Numeric type (float or double recommended)
Member Function Documentation
◆ getAngularVelocity()
|
inlineoverridevirtual |
Implements IMotionState3D.
◆ getOrientation()
|
inlineoverridevirtual |
Get the current orientation (IMotionState3D)
Implements IMotionState3D.
◆ getPosition()
|
inlineoverridevirtual |
Get the current position (IMotionState3D)
Implements IMotionState3D.
◆ getSpeed()
|
inlineoverridevirtual |
Implements IMotionState3D.
◆ update()
|
inline |
Update with accelerometer and gyro measurements accelX, accelY, accelZ in sensor frame (m/s^2) gyroX, gyroY, gyroZ in rad/s (roll, pitch, yaw rates)
The documentation for this class was generated from the following file:
- src/TinyRobotics/imu/IMU3D.h