3D motion/path controller using PID for position and orientation. More...
#include <MotionController3D.h>
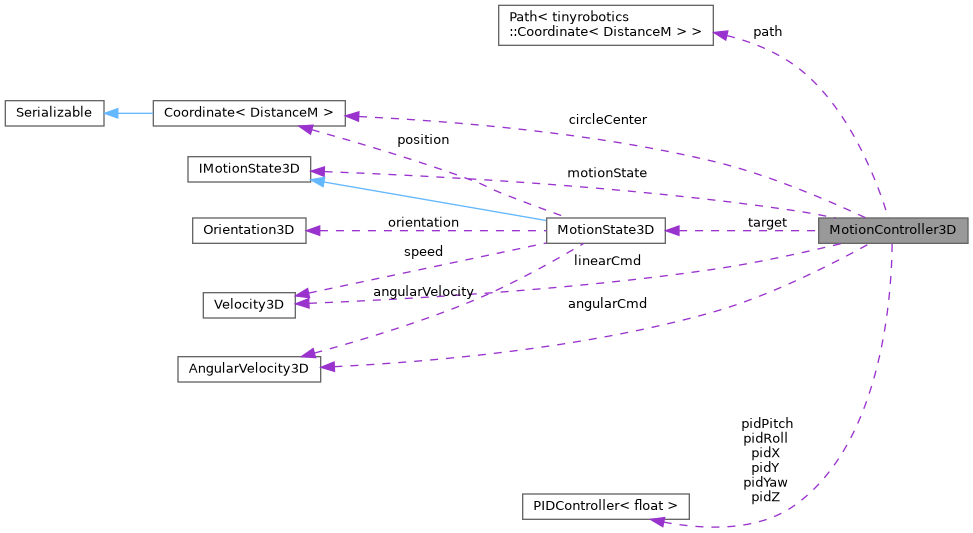
Collaboration diagram for MotionController3D:
Public Member Functions | |
| MotionController3D (IMotionState3D &motionStateRef, OnGoalAction onGloal, float positionToleranceM=2.0) | |
| void | configurePositionPID (float dt, float maxOut, float minOut, float kp, float ki, float kd) |
| void | configureOrientationPID (float dt, float minOut, float maxOut, float kp, float ki, float kd) |
| void | setPath (Path< Coordinate< DistanceM > > path) |
| void | begin () |
| Initialize controller and set target from first path coordinate if available. | |
| void | end () |
| Stop the controller and the vehicle. | |
| bool | update () |
| Update the controller and compute new commands. | |
| Speed3D | getLinearCommand () const |
| AngularVelocity3D | getAngularCommand () const |
| MotionState3D | getTarget () const |
| bool | isActive () const |
| void | setOnGoalAction (OnGoalAction action) |
| Set the OnGoalAction behavior (Stop, HoldPosition, Circle). Resets circle mode state if changed. | |
| void | setOnGoalCallback (bool(*callback)(void *), void *ref=nullptr) |
| Set a custom callback to be called when reaching the goal. The callback should return true if it handled the goal action, or false to allow default handling. | |
| void | setCircleRadius (float radius) |
| Set the radius for circular motion (meters). | |
| void | setCircleAngularSpeed (float angularSpeed) |
| Set the angular speed for circular motion (radians per update). | |
Protected Member Functions | |
| bool | initializeDtFromUpdates () |
| bool | advanceWaypoint (float positionTolerance=0.1f) |
| void | handleOnGoalAction () |
Protected Attributes | |
| bool | is_active = false |
| float | positionToleranceM |
| OnGoalAction | onGoalAction |
| Path< Coordinate< DistanceM > > | path |
| IMotionState3D & | motionState |
| MotionState3D | target |
| PIDController< float > | pidX |
| PIDController< float > | pidY |
| PIDController< float > | pidZ |
| PIDController< float > | pidYaw |
| PIDController< float > | pidPitch |
| PIDController< float > | pidRoll |
| Speed3D | linearCmd = Speed3D(0, 0, 0, SpeedUnit::MPS) |
| AngularVelocity3D | angularCmd |
| bool(* | onGoalCallback )(void *) = nullptr |
| void * | onGoaldRef = this |
| int | updateCount = 0 |
| unsigned long | updateStartTimeMs = 0 |
| unsigned long | updateEndTimeMs = 0 |
| bool | dtSetFromUpdates = false |
| float | circlePhase = 0.0f |
| float | circleRadius = 5.0f |
| float | circleAngularSpeed = 0.5f |
| Coordinate< DistanceM > | circleCenter |
| bool | circleInitialized = false |
Detailed Description
3D motion/path controller using PID for position and orientation.
This class provides high-level 3D path following and pose control for robots, drones, or vehicles. It uses independent PID controllers for each axis (x, y, z) and orientation (yaw, pitch, roll).
Features
- Accepts a reference to an IMotionState3D for real-time feedback
- Supports a path of 3D waypoints (Path<Coordinate<DistanceM>>)
- Automatically advances to the next waypoint when the current one is reached
- PID gains and limits are configurable for both position and orientation
- Provides update() to compute new commands, and getters for linear/angular velocity commands
- begin() initializes the target from the first path coordinate
Usage
- Create with a reference to your IMotionState3D implementation (e.g., IMU3D)
- Set a path of waypoints with setPath()
- Call begin() to initialize the first target
- In your control loop:
- Call update() to compute new commands
- Use getLinearCommand() and getAngularCommand() for actuation
Limitations
- Only the position is updated from the path; orientation, speed, and angular velocity are kept from the previous target
Example
MotionController3D controller(imu3d);
controller.setPath(path);
controller.begin();
while (!controller.isPathComplete()) {
controller.update();
auto v = controller.getLinearCommand();
auto w = controller.getAngularCommand();
// send v, w to actuators
controller.advanceWaypoint();
}
3D motion/path controller using PID for position and orientation.
Definition: MotionController3D.h:62
Member Function Documentation
◆ initializeDtFromUpdates()
|
inlineprotected |
Handles dt initialization from first 10 updates, but does not block control logic
◆ update()
|
inline |
Update the controller and compute new commands.
- Returns
- true if we still have a path to follow, false if path is complete or controller is inactive.
Member Data Documentation
◆ angularCmd
|
protected |
Initial value:
=
AngularVelocity3D(0, 0, 0, AngularVelocityUnit::RadPerSec)
◆ target
|
protected |
Initial value:
=
MotionState3D(Coordinate<DistanceM>(0, 0, 0), Orientation3D(), Speed3D(),
AngularVelocity3D())
The documentation for this class was generated from the following file:
- src/TinyRobotics/control/MotionController3D.h