A grid map for spatial representation, navigation, and planning. More...
#include <GridMap.h>
Classes | |
| struct | Cell |
| Cell structure to represent grid cell indices. More... | |
Public Member Functions | |
| GridMap ()=default | |
| Default constructor. | |
| GridMap (int xCount, int yCount, DistanceM resolutionM) | |
| Construct with cell counts and resolution in meters. | |
| GridMap (int xCount, int yCount, Distance resolution) | |
| Construct with cell counts and Distance object for resolution. | |
| bool | worldToCell (DistanceM wx, DistanceM wy, Cell &cell) const |
| World to cell conversion. | |
| void | cellToWorld (int cx, int cy, DistanceM &wx, DistanceM &wy) const |
| Cell to world (center of cell) | |
| Coordinate< DistanceM > | toWorld (int cx, int cy) const |
| Provide the workd coordinates for the cell. | |
| bool | getCell (int cx, int cy, StateT &result) |
| Provide access to cell state by cell index. | |
| bool | getCell (int cx, int cy, CellState &result) const |
| Provide access to cell state by cell index. | |
| bool | getCell (Coordinate< T > &coord, CellState &result) |
| Provide access to cell state by coordinate. | |
| void | setCell (Cell &cell, CellState value) |
| Provide access to cell state by coordinate. | |
| void | setCell (int cx, int cy, CellState value) |
| Set cell state (for initialization or manual updates) | |
| void | setCell (Coordinate< T > &coord, CellState value) |
| Set cell state by coordinate (converts to cell index internally) | |
| std::vector< Cell > | getNeighborCells (const Coordinate< DistanceM > from) const |
| Determine all neighboring cells (8-connected) for a given cell coordinate. | |
| std::vector< Coordinate< T > > | getNeighbors (Coordinate< T > from) const |
| Get world coordinates of neighboring cells (for pathfinding or navigation) | |
| void | resize (int newXCount, int newYCount) |
| Resize the grid to new dimensions. | |
| int | getXCount () const |
| Get the number of cells in the x direction. | |
| int | getYCount () const |
| Get the number of cells in the y direction. | |
| float | getResolution () const |
| Get the cell resolution in meters. | |
| void | setResolution (float resM) |
| Defines the resolution in meters. | |
| bool | isValid (const Coordinate< T > &coord) const |
| Check if a coordinate is within the map bounds. | |
| void | setCellStateCallback (CellState(*cb)(const StateT &, void *ref)) |
| Set the callback for converting StateType to CellState. | |
| void | setValidityCallback (bool(*cb)(int cx, int cy, void *ref)) |
| Set the callback for cell validity checking. | |
| void | setReference (void *ref) |
| Set the reference pointer passed to callbacks. | |
| size_t | writeTo (Print &out) |
| Write map to output. | |
| size_t | readFrom (Stream &in) |
| Read map from input. | |
| virtual int | getXCount () const =0 |
| Get the number of cells in the X direction. | |
| virtual int | getYCount () const =0 |
| Get the number of cells in the Y direction. | |
| virtual float | getResolution () const =0 |
| Get the map resolution (cell size in meters). | |
| virtual bool | getCell (int x, int y, CellState &state) const =0 |
| Get the state of a cell by integer indices. | |
| virtual Coordinate< T > | toWorld (int x, int y) const =0 |
| Convert cell indices to world coordinates. | |
| virtual std::vector< Coordinate< T > > | getNeighbors (Coordinate< T > from) const =0 |
| Get world coordinates of neighboring cells (for pathfinding or navigation). | |
| virtual bool | isValid (const Coordinate< T > &coord) const =0 |
| Check if a coordinate is inside the map bounds. | |
Static Protected Member Functions | |
| static bool | isValid (int cx, int cy, void *ref) |
Protected Attributes | |
| int | xCount = 0 |
| int | yCount = 0 |
| float | resolution = 0 |
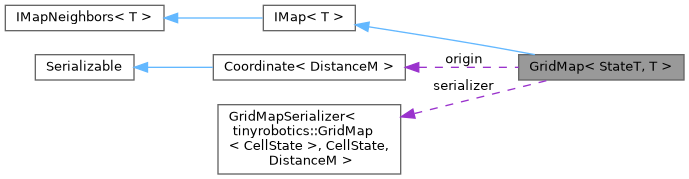
| Coordinate< T > | origin |
| void * | reference = this |
| bool(* | is_valid_cb )(int cx, int cy, void *) = isValid |
| CellState(* | get_cellstate_cb )(const StateT &, void *ref) = nullptr |
| std::vector< StateT, AllocatorPSRAM< StateT > > | data |
| GridMapSerializer< GridMap< StateT >, StateT, T > | serializer |
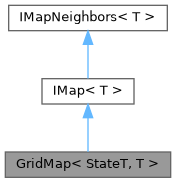
Detailed Description
class tinyrobotics::GridMap< StateT, T >
A grid map for spatial representation, navigation, and planning.
The GridMap class models the environment as a regular grid of cells, each storing a state (e.g., occupancy, height, or other user-defined data). It supports:
- Conversion between world coordinates and grid cell indices
- Efficient cell state access and modification
- Binary Bayesian updates for probabilistic occupancy mapping
- Custom cell validity logic (e.g., for dynamic obstacles)
- Extraction of valid neighbor cells for pathfinding (8-connected)
Typical use cases include:
- Robot navigation and path planning
- Occupancy grid mapping (SLAM)
- Environment modeling for simulation or AI
Features:
- Template parameter for cell state type (e.g., occupancy, height)
- World-to-cell and cell-to-world coordinate conversion
- Fast access to cell state by index or coordinate
- Probabilistic update using log-odds for sensor fusion
- Customizable cell validity via callback (see setValidityCallback)
- Customizable cell state conversion via callback (see setCellStateCallback)
- Neighbor cell extraction for graph-based search
Callback Notes:
- Validity Callback: Use setValidityCallback to provide custom logic for determining if a cell is valid (e.g., for dynamic obstacles or special terrain). The callback receives cell indices and an optional reference pointer.
- Cell State Callback: Use setCellStateCallback to provide custom logic for converting StateType to CellState (e.g., for visualization or compatibility with algorithms expecting CellState). The callback receives the cell value and an optional reference pointer.
- Use setReference to set the reference pointer passed to both callbacks.
Example:
- Template Parameters
-
StateType The type stored in each cell (e.g., occupancy, height) T Numeric type for coordinates (default: float)
Member Function Documentation
◆ getCell()
|
inlinevirtual |
Provide access to cell state by cell index.
Implements IMap< T >.
◆ getNeighbors()
|
inlinevirtual |
Get world coordinates of neighboring cells (for pathfinding or navigation)
Implements IMapNeighbors< T >.
◆ getResolution()
|
inlinevirtual |
Get the cell resolution in meters.
Implements IMap< T >.
◆ getXCount()
|
inlinevirtual |
Get the number of cells in the x direction.
Implements IMap< T >.
◆ getYCount()
|
inlinevirtual |
Get the number of cells in the y direction.
Implements IMap< T >.
◆ isValid() [1/2]
|
inlinevirtual |
Check if a coordinate is within the map bounds.
- Parameters
-
coord The coordinate to check.
- Returns
- true if the coordinate is inside the map, false otherwise.
Implements IMapNeighbors< T >.
◆ isValid() [2/2]
|
inlinestaticprotected |
Default validity check: a cell is valid if it's not occupied. This can be overridden with a custom callback for more complex logic (e.g., dynamic obstacles, special terrain, etc.).
◆ toWorld()
|
inlinevirtual |
Provide the workd coordinates for the cell.
Implements IMap< T >.
The documentation for this class was generated from the following file:
- src/TinyRobotics/maps/GridMap.h