Abstract interface for neighbor queries in map-like data structures. More...
#include <IMap.h>
Public Member Functions | |
| virtual std::vector< Coordinate< T > > | getNeighbors (Coordinate< T > from) const =0 |
| Get world coordinates of neighboring cells (for pathfinding or navigation). | |
| virtual bool | isValid (const Coordinate< T > &coord) const =0 |
| Check if a coordinate is inside the map bounds. | |
Detailed Description
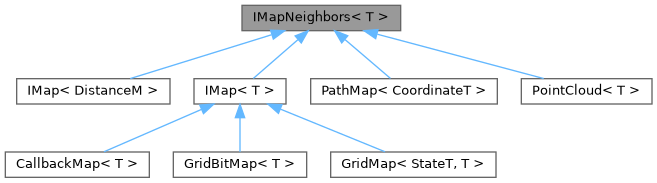
class tinyrobotics::IMapNeighbors< T >
Abstract interface for neighbor queries in map-like data structures.
Provides a minimal interface for pathfinding and navigation algorithms to query neighboring coordinates and check coordinate validity. Any map or graph class that supports neighbor queries can implement this interface, enabling use with generic planning algorithms (e.g., A*, Dijkstra).
- Template Parameters
-
T Scalar type for coordinates and math (default: DistanceM)
Required Methods
- getNeighbors(Coordinate<T> from): Return a vector of neighboring coordinates for a given node.
- isValid(const Coordinate<T>& coord): Return true if the coordinate is valid (e.g., inside map or graph).
Member Function Documentation
◆ getNeighbors()
|
pure virtual |
Get world coordinates of neighboring cells (for pathfinding or navigation).
- Parameters
-
from The cell coordinate to find neighbors for.
- Returns
- Vector of neighboring coordinates.
Implemented in GridBitMap< T >, GridMap< StateT, T >, CallbackMap< T >, and PointCloud< T >.
◆ isValid()
|
pure virtual |
Check if a coordinate is inside the map bounds.
- Parameters
-
coord The coordinate to check.
- Returns
- True if valid, false otherwise.
Implemented in GridBitMap< T >, GridMap< StateT, T >, CallbackMap< T >, and PointCloud< T >.
The documentation for this class was generated from the following file:
- src/TinyRobotics/maps/IMap.h