Car model with differential drive. The direction is controlled by adjusting the speed of the motors. Even motors are on the left side, odd motors are on the right side. More...
#include <CarDifferential.h>
Public Member Functions | |
| void | setPins (int motor, int in1, int in2) |
| Set the pins for a specific motor (0=front left, 1=front right, 2=rear left, 3=rear right) | |
| void | setSpeed (float percent) |
| Set forward/reverse speed for all motors (percent, -100 to 100). Positive = forward, negative = reverse. | |
| void | setSteeringAgle (float angle) |
| Set turn (percent, -100 to 100). Positive = right, negative = left. This slows down the motors on one side to turn the car. | |
| void | setSteeringAngle (Angle angle) |
| void | end () override |
| Stop all motors and reset speed and turn state. | |
| void | setMotorGain (int motor, float gain) |
| Set a calibration gain for a specific motor (default 1.0). | |
| bool | isPinsSet () const |
| Check if the necessary pins for the vehicle's actuators have been set (pure virtual). | |
| bool | onMessage (const Message< float > &msg) override |
| Handle an incoming message (pure virtual). | |
| std::vector< MessageContent > | getControls () const override |
| MotorMT & | getMotor (size_t index) |
| std::vector< IMotor< T > * > | getMotors () override |
 Public Member Functions inherited from Vehicle< MotorT > Public Member Functions inherited from Vehicle< MotorT > | |
| bool | begin () |
| Initialize the vehicle. | |
| virtual void | end ()=0 |
| Reset the vehicle to a safe or neutral state (pure virtual). | |
| virtual bool | isPinsSet () const =0 |
| Check if the necessary pins for the vehicle's actuators have been set (pure virtual). | |
| virtual std::vector< MessageContent > | getControls () const =0 |
| float | getSpeedFactor () const |
| Get the speed factor (scaling for speed commands). | |
| void | setSpeedFactor (float factor) |
| Set the speed factor (scaling for speed commands). | |
| virtual std::vector< IMotor< MotorT > * > | getMotors ()=0 |
| Public Member Functions inherited from MessageHandler | |
| virtual bool | onMessage (const Message< float > &msg)=0 |
| Handle an incoming message (pure virtual). | |
| virtual bool | onMessage (const Message< Coordinate< float > > &msg) |
| virtual bool | onMessage (const Message< GPSCoordinate > &msg) |
| virtual bool | onMessage (const Message< MotionState3D > &msg) |
| Public Member Functions inherited from MessageSource | |
| void | subscribe (MessageHandler &handler, MessageOrigin origin=MessageOrigin::Undefined, MessageContent content=MessageContent::Undefined) |
| Subscribe a message handler to this source, with optional filtering. | |
| void | unsubscribeAll () |
| Remove all registered message handlers. | |
| void | sendMessage (Message< float > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< Coordinate< float > > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< GPSCoordinate > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< MotionState3D > &msg) |
| Overload for MotionState3D messages. | |
Protected Member Functions | |
| void | updateMotors () |
| Update all motors based on speed and turn. | |
Protected Attributes | |
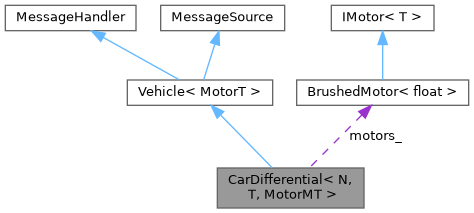
| MotorMT | motors_ [N] |
| float | motorGain_ [N] = {1.0f, 1.0f, 1.0f, 1.0f} |
| float | speed_ |
| float | turn_ |
| Protected Attributes inherited from Vehicle< MotorT > | |
| float | speedFactor_ = 1.0f |
| Protected Attributes inherited from MessageSource | |
| std::vector< MessageHandlerEntry > | messageHandlers_ |
Detailed Description
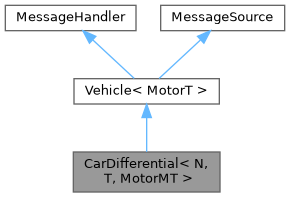
class tinyrobotics::CarDifferential< N, T, MotorMT >
Car model with differential drive. The direction is controlled by adjusting the speed of the motors. Even motors are on the left side, odd motors are on the right side.
This class abstracts a simple N-wheel-drive car:
- N motor count (e.g. 4: front left, front right, rear left, rear right) via HBridge
- No steering servo: direction is controlled by varying motor speeds
Usage Example:
Member Function Documentation
◆ end()
|
inlineoverridevirtual |
Stop all motors and reset speed and turn state.
Implements Vehicle< MotorT >.
◆ getControls()
|
inlineoverridevirtual |
Implements Vehicle< MotorT >.
◆ getMotors()
|
inlineoverridevirtual |
Implements Vehicle< MotorT >.
◆ isPinsSet()
|
inlinevirtual |
Check if the necessary pins for the vehicle's actuators have been set (pure virtual).
Implements Vehicle< MotorT >.
◆ onMessage()
|
inlineoverridevirtual |
Handle an incoming message (pure virtual).
This method should be implemented by derived classes to process messages.
- Parameters
-
msg The message to handle.
- Returns
- true if the message was handled successfully, false otherwise.
Implements MessageHandler.
◆ setMotorGain()
|
inline |
Set a calibration gain for a specific motor (default 1.0).
- Parameters
-
motor Motor index (0=front left, 1=front right, 2=rear left, 3=rear right) gain Gain factor (e.g., 1.05 for +5% output)
◆ updateMotors()
|
inlineprotected |
Update all motors based on speed and turn.
- m1: front left
- m2: front right
- m3: rear left
- m4: rear right
To turn right, left motors go slower, right motors go faster (and vice versa).
The documentation for this class was generated from the following file:
- src/TinyRobotics/vehicles/CarDifferential.h