Estimates vehicle speed from throttle percentage using calibration data. More...
#include <SpeedFromThrottle.h>
Public Member Functions | |
| SpeedFromThrottle (float maxSpeedMps, uint8_t numMotors=1) | |
| SpeedFromThrottle (Speed maxSpeed, uint8_t numMotors=1) | |
| void | setMaxSpeed (Speed speed) |
| bool | onMessage (const Message< float > &msg) override |
| Handle Throttle messages to update speed. | |
| void | addSpeedCalibration (float throttlePercent, float speedMps) |
| Add or update a calibration point (throttlePercent, speedMps) | |
| void | clearCalibration () |
| Clear all calibration data. | |
| void | setThrottlePercent (float throttlePercent, uint8_t motor=0) override |
| Define the actual throttle value. | |
| Speed | getSpeed (uint8_t motor=0) const override |
| Get the actual speed based on the last throttle value. | |
| Speed | updateSpeed (uint32_t deltaTimeMs, uint8_t motor=0) override |
| For sources with inertia, call this in your main loop with the elapsed time (in milliseconds) to update the speed estimate for a specific motor. | |
| size_t | getMotorCount () const override |
 Public Member Functions inherited from MessageSource Public Member Functions inherited from MessageSource | |
| void | subscribe (MessageHandler &handler, MessageOrigin origin=MessageOrigin::Undefined, MessageContent content=MessageContent::Undefined) |
| Subscribe a message handler to this source, with optional filtering. | |
| void | unsubscribeAll () |
| Remove all registered message handlers. | |
| void | sendMessage (Message< float > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< Coordinate< float > > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< GPSCoordinate > &msg) |
| Publish a message to all registered handlers. | |
| void | sendMessage (const Message< MotionState3D > &msg) |
| Overload for MotionState3D messages. | |
| Public Member Functions inherited from MessageHandler | |
| virtual bool | onMessage (const Message< float > &msg)=0 |
| Handle an incoming message (pure virtual). | |
| virtual bool | onMessage (const Message< Coordinate< float > > &msg) |
| virtual bool | onMessage (const Message< GPSCoordinate > &msg) |
| virtual bool | onMessage (const Message< MotionState3D > &msg) |
| virtual Speed | getSpeed (uint8_t motor=0) const =0 |
| Get the current speed. | |
| virtual void | setThrottlePercent (float value, uint8_t motor=0)=0 |
| Publish actual speed for a specific motor. | |
| virtual Speed | updateSpeed (uint32_t deltaTimeMs, uint8_t motor=0)=0 |
| For sources with inertia, call this in your main loop with the elapsed time (in milliseconds) to update the speed estimate for a specific motor. | |
| virtual size_t | getMotorCount () const =0 |
Protected Member Functions | |
| bool | init () |
| void | sendSpeedMessage (uint8_t motor=0) |
| float | getSpeedMPS (float throttlePercent) const |
| Get speed in meters per second by interpolating calibration data. | |
Protected Attributes | |
| std::vector< std::pair< float, float > > | calibrationData |
| std::vector< float > | speedMps |
| uint8_t | numMotors = 1 |
| float | maxSpeedMps = 0.0f |
| Protected Attributes inherited from MessageSource | |
| std::vector< MessageHandlerEntry > | messageHandlers_ |
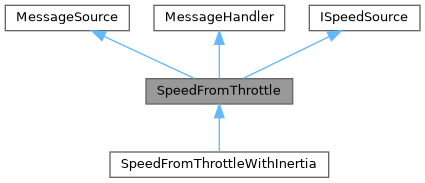
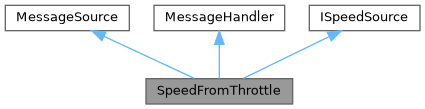
Detailed Description
Estimates vehicle speed from throttle percentage using calibration data.
This class provides a flexible, piecewise linear mapping from throttle percentage (e.g., -100% to 100%) to speed (in meters per second), based on user-provided calibration points. It is useful for systems where direct speed measurement is unavailable or unreliable, and a throttle-to-speed relationship can be established empirically. The mapping can be linear or non-linear, depending on the calibration data.
Features:
- By default, 0% throttle maps to 0 m/s, 100% throttle maps to maxSpeedMps, and -100% throttle maps to -maxSpeedMps.
- Additional calibration points can be added with addSpeedCalibration(throttle, speed), allowing for non-linear mappings.
- If a calibration point for a throttle value already exists, it is replaced; otherwise, it is inserted in order.
- Supports both direct speed queries (getSpeed, getSpeedMPS) and integration with the TinyRobotics message system.
- When used as a MessageHandler, it listens for Throttle messages and emits Speed messages via MessageSource.
- Calibration data can be cleared and redefined at runtime.
Typical usage:
Integration:
- Use as a standalone utility for throttle-to-speed conversion.
- Or, connect to a MessageBus to automatically convert Throttle messages to Speed messages.
- See also
- addSpeedCalibration, getSpeed, getSpeedMPS, onMessage, clearCalibration
Member Function Documentation
◆ getMotorCount()
|
inlineoverridevirtual |
Implements ISpeedSource.
◆ getSpeed()
|
inlineoverridevirtual |
Get the actual speed based on the last throttle value.
Implements ISpeedSource.
Reimplemented in SpeedFromThrottleWithInertia.
◆ onMessage()
|
inlineoverridevirtual |
Handle Throttle messages to update speed.
Implements MessageHandler.
◆ setThrottlePercent()
|
inlineoverridevirtual |
Define the actual throttle value.
Implements ISpeedSource.
Reimplemented in SpeedFromThrottleWithInertia.
◆ updateSpeed()
|
inlineoverridevirtual |
For sources with inertia, call this in your main loop with the elapsed time (in milliseconds) to update the speed estimate for a specific motor.
Implements ISpeedSource.
Reimplemented in SpeedFromThrottleWithInertia.
The documentation for this class was generated from the following file:
- src/TinyRobotics/odometry/SpeedFromThrottle.h