Manages a hierarchy of 3D coordinate frames and enables SE(3) transforms. More...
#include <FrameMgr3D.h>
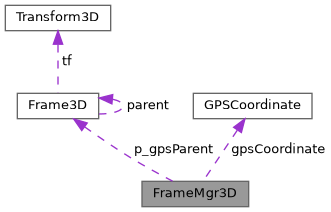
Collaboration diagram for FrameMgr3D:
Public Member Functions | |
| Transform3D | getTransform (const Frame3D &from, const Frame3D &to) const |
| void | setGPS (Frame3D &gpsParent, const GPSCoordinate &gps, float rotationDeg=0.0f) |
| Sets the GPS reference for a frame. | |
| GPSCoordinate | toGPS (const Frame3D &frame, const std::array< float, 3 > &local) const |
| Converts a coordinate in the given frame to a GPS coordinate. | |
Protected Member Functions | |
| std::vector< const Frame3D * > | getPathToRoot (const Frame3D *frame) const |
Protected Attributes | |
| Frame3D * | p_gpsParent = nullptr |
| GPSCoordinate | gpsCoordinate |
| float | gpsRotationDeg = 0.0f |
Detailed Description
Manages a hierarchy of 3D coordinate frames and enables SE(3) transforms.
FrameMgr3D is designed for robotics and navigation applications where multiple coordinate frames (such as world, robot base, and sensors) must be related and transformed. It supports:
- Defining a tree of 3D frames, each with a pose (translation and quaternion rotation) relative to its parent.
- Computing the SE(3) transform between any two frames in the hierarchy.
Example:
FrameMgr3D mgr;
Frame3D world(FrameType3D::WORLD);
Frame3D base(FrameType3D::BASE_LINK, 0, &world, Transform3D{1,2,0,0,0,0,1});
Frame3D camera(FrameType3D::CAMERA, 0, &base,
Transform3D{0.1,0,0.2,0,0,0,1}); Transform3D tf = mgr.getTransform(camera,
world);
Represents a 3D coordinate frame in a hierarchical frame tree.
Definition: FrameMgr3D.h:97
Manages a hierarchy of 3D coordinate frames and enables SE(3) transforms.
Definition: FrameMgr3D.h:141
Represents a 3D rigid body transform: translation (tx, ty, tz) and quaternion rotation (qx,...
Definition: FrameMgr3D.h:18
Member Function Documentation
◆ setGPS()
|
inline |
Sets the GPS reference for a frame.
- Parameters
-
gpsParent The frame to associate with the GPS reference. gps The GPS coordinate at the origin of gpsParent. rotationDeg Rotation from local x to GPS north (degrees).
◆ toGPS()
|
inline |
Converts a coordinate in the given frame to a GPS coordinate.
- Parameters
-
frame The frame in which the coordinate is expressed. local The coordinate in the local frame (meters).
- Returns
- The corresponding GPS coordinate.
The documentation for this class was generated from the following file:
- src/TinyRobotics/coordinates/FrameMgr3D.h