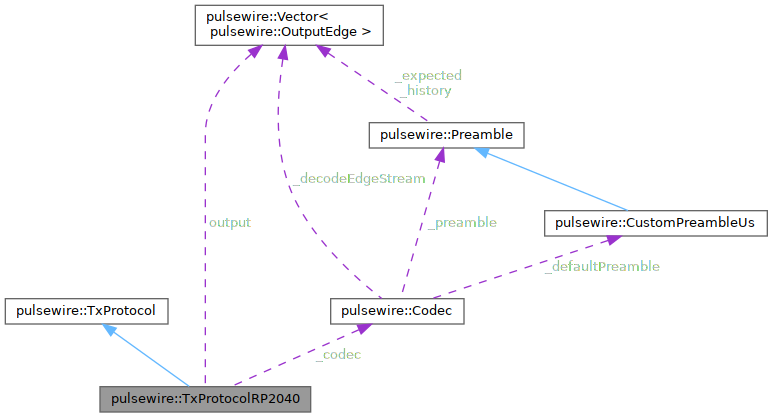
RP2040-specific TxProtocol implementation using PIO and DMA for precise timing. More...
#include <TxDriverRP2040.h>
Public Member Functions | |
| void | setFrameSize (uint16_t size) override |
| bool | begin (Codec *p_codec, uint8_t pin) override |
| void | sendPreamble () override |
| void | sendData (const uint8_t *data, uint8_t len, uint32_t bitPeriod) override |
| void | sendEnd (bool &useChecksum, bool isDelayAfterFrame, uint32_t bitPeriod) override |
| bool | isFrameClosed () const override |
| virtual bool | begin (uint32_t bitFrequencyHz, Codec *p_codec, uint8_t pin)=0 |
| virtual void | sendData (const uint8_t *data, uint8_t len)=0 |
| virtual void | sendEnd (bool &_useChecksum)=0 |
Protected Member Functions | |
| void | sendEdgesPIO (const Vector< OutputEdge > &edges) |
Protected Attributes | |
| Codec * | _codec = nullptr |
| uint8_t | _txPin |
| uint16_t | _frameSize = 64 |
| Vector< OutputEdge > | output |
| uint8_t | sum = 0 |
| bool | is_frame_closed = true |
| PIO | pio = PIO(0) |
| uint8_t | sm = 0 |
| uint32_t | offset = 0 |
Static Protected Attributes | |
| static const char * | ir_tx_pio_program |
Detailed Description
RP2040-specific TxProtocol implementation using PIO and DMA for precise timing.
Definition at line 17 of file TxDriverRP2040.h.
Member Function Documentation
◆ begin() [1/2]
Definition at line 26 of file TxDriverRP2040.h.
◆ begin() [2/2]
|
pure virtualinherited |
Implemented in pulsewire::TxProtocolGeneric.
◆ isFrameClosed()
|
inlineoverridevirtual |
Implements pulsewire::TxProtocol.
Definition at line 98 of file TxDriverRP2040.h.
◆ sendData() [1/2]
|
pure virtualinherited |
Implemented in pulsewire::TxProtocolGeneric.
◆ sendData() [2/2]
|
inlineoverride |
Definition at line 66 of file TxDriverRP2040.h.
◆ sendEdgesPIO()
|
inlineprotected |
Definition at line 112 of file TxDriverRP2040.h.
◆ sendEnd() [1/2]
Implemented in pulsewire::TxProtocolGeneric.
◆ sendEnd() [2/2]
|
inlineoverride |
Definition at line 80 of file TxDriverRP2040.h.
◆ sendPreamble()
|
inlineoverridevirtual |
Implements pulsewire::TxProtocol.
Definition at line 57 of file TxDriverRP2040.h.
◆ setFrameSize()
Implements pulsewire::TxProtocol.
Definition at line 21 of file TxDriverRP2040.h.
Field Documentation
◆ _codec
Definition at line 101 of file TxDriverRP2040.h.
◆ _frameSize
|
protected |
Definition at line 103 of file TxDriverRP2040.h.
◆ _txPin
|
protected |
Definition at line 102 of file TxDriverRP2040.h.
◆ ir_tx_pio_program
Definition at line 140 of file TxDriverRP2040.h.
◆ is_frame_closed
Definition at line 106 of file TxDriverRP2040.h.
◆ offset
|
protected |
Definition at line 110 of file TxDriverRP2040.h.
◆ output
|
protected |
Definition at line 104 of file TxDriverRP2040.h.
◆ pio
Definition at line 108 of file TxDriverRP2040.h.
◆ sm
|
protected |
Definition at line 109 of file TxDriverRP2040.h.
◆ sum
|
protected |
Definition at line 105 of file TxDriverRP2040.h.
The documentation for this class was generated from the following file:
- src/sandbox/TxDriverRP2040.h