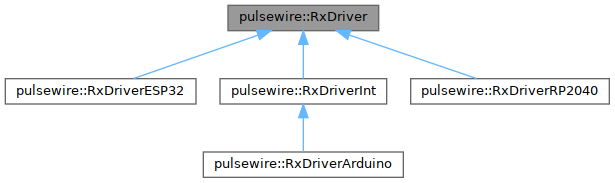
Abstract base class for IR receivers. More...
#include <RxDriver.h>
Public Member Functions | |
| virtual void | setFrameSize (uint16_t size)=0 |
| Set the expected frame size for dynamic data reception. | |
| virtual bool | begin (uint32_t bitFrequencyHz)=0 |
| Start the receiver. | |
| virtual void | end ()=0 |
| Stop the receiver. | |
| virtual size_t | readBytes (uint8_t *data, size_t size)=0 |
| virtual int | available ()=0 |
| Get the number of bytes available in the internal buffer. | |
| virtual void | setRxBufferSize (size_t size)=0 |
| Set the size of the internal RX buffer. | |
| void | setTimeout (uint32_t timeoutMs) |
| Defines the read timeout for readBytes() in milliseconds. | |
Protected Attributes | |
| uint32_t | _readTimeoutMs = 50 |
Detailed Description
Abstract base class for IR receivers.
Definition at line 10 of file RxDriver.h.
Member Function Documentation
◆ available()
Get the number of bytes available in the internal buffer.
Implemented in pulsewire::RxDriverArduino, pulsewire::RxDriverESP32, and pulsewire::RxDriverRP2040.
◆ begin()
Start the receiver.
Implemented in pulsewire::RxDriverESP32, and pulsewire::RxDriverArduino.
◆ end()
Stop the receiver.
Implemented in pulsewire::RxDriverArduino, and pulsewire::RxDriverESP32.
◆ readBytes()
Read up to 'size' bytes from the internal buffer into 'data'. Returns number of bytes read.
Implemented in pulsewire::RxDriverArduino, pulsewire::RxDriverESP32, and pulsewire::RxDriverRP2040.
◆ setFrameSize()
Set the expected frame size for dynamic data reception.
Implemented in pulsewire::RxDriverArduino, pulsewire::RxDriverESP32, and pulsewire::RxDriverRP2040.
◆ setRxBufferSize()
Set the size of the internal RX buffer.
Implemented in pulsewire::RxDriverArduino, and pulsewire::RxDriverESP32.
◆ setTimeout()
Defines the read timeout for readBytes() in milliseconds.
Definition at line 26 of file RxDriver.h.
Field Documentation
◆ _readTimeoutMs
|
protected |
Definition at line 29 of file RxDriver.h.
The documentation for this class was generated from the following file:
- src/pulse/RxDriver.h