Provides common logic for transmitting signals using various framing modes. More...
#include <TxDriverCommon.h>

Public Member Functions | |
| TxDriverCommon (TxProtocol &protocol, Codec &codec, uint8_t pin, bool useChecksum=false) | |
| virtual void | init (TxProtocol &protocol, Codec &codec, uint8_t pin, bool useChecksum=false) |
| bool | begin (uint32_t bitFrequencyHz) override |
| void | setFrameSize (uint16_t size) |
| Set the expected frame size for dynamic data transmission. | |
| void | setFramingMode (FramingMode mode) override |
| int | write (uint8_t byte) override |
| size_t | write (const uint8_t *data, size_t len) |
| Build frames in the buffer and send when full. | |
| void | flush () override |
| virtual void | end () |
Protected Member Functions | |
| void | sendPreamble () |
| void | sendData (const uint8_t *data, uint8_t len) |
| void | sendEnd () |
Protected Attributes | |
| Codec * | _codec = nullptr |
| TxProtocol * | _protocol = nullptr |
| RingBuffer< uint8_t > | _byteBuffer |
| uint16_t | _frameSize = DEFAULT_FRAME_SIZE |
| FramingMode | _framingMode = FramingMode::WriteBytes |
| uint16_t | _bitFrequencyHz = DEFAULT_BIT_FREQ_HZ |
| bool | _useChecksum = false |
| uint8_t | check_sum = 0 |
| uint8_t | _pin = -1 |
| bool | isPreambleSent = false |
Detailed Description
Provides common logic for transmitting signals using various framing modes.
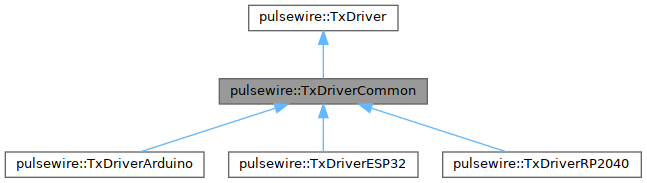
The TxDriverCommon class is a foundational component for managing the transmission of signals. It integrates a specified TxProtocol and Codec implementation to handle the framing and buffering of data. The class is responsible for:
- Managing the framing modes for data transmission.
- Buffering data dynamically and sending frames when the buffer is full.
- Encoding bytes into signal edges and timings using the provided
Codec. - Sending preambles, data, and end signals based on the selected framing mode.
This class supports dynamic configuration of frame sizes, framing modes, and optional checksum appending for data integrity. It is designed to work with a specified transmission pin and bit frequency.
- Note
- The
Codechandles the encoding of bytes into signal edges and timings, while theTxProtocolmanages the protocol-specific details of the transmission.
Definition at line 36 of file TxDriverCommon.h.
Constructor & Destructor Documentation
◆ TxDriverCommon()
|
inline |
- Parameters
-
codec IR codec pin TX pin signal Signal implementation freqHz Bit frequency useChecksum If true, append checksum to frame (default: false)
Definition at line 46 of file TxDriverCommon.h.
Member Function Documentation
◆ begin()
Implements pulsewire::TxDriver.
Definition at line 62 of file TxDriverCommon.h.
◆ end()
Definition at line 25 of file TxDriver.h.
◆ flush()
|
inlineoverridevirtual |
Reimplemented from pulsewire::TxDriver.
Definition at line 121 of file TxDriverCommon.h.
◆ init()
|
inlinevirtual |
Definition at line 52 of file TxDriverCommon.h.
◆ sendData()
Definition at line 151 of file TxDriverCommon.h.
◆ sendEnd()
|
inlineprotected |
Definition at line 157 of file TxDriverCommon.h.
◆ sendPreamble()
|
inlineprotected |
Definition at line 144 of file TxDriverCommon.h.
◆ setFrameSize()
Set the expected frame size for dynamic data transmission.
Implements pulsewire::TxDriver.
Definition at line 72 of file TxDriverCommon.h.
◆ setFramingMode()
|
inlineoverridevirtual |
Set the framing mode for how data is sent (e.g., fixed-size frames, immediate write, or flush)
Implements pulsewire::TxDriver.
Definition at line 82 of file TxDriverCommon.h.
◆ write() [1/2]
Build frames in the buffer and send when full.
Implements pulsewire::TxDriver.
Definition at line 103 of file TxDriverCommon.h.
◆ write() [2/2]
Implements pulsewire::TxDriver.
Definition at line 84 of file TxDriverCommon.h.
Field Documentation
◆ _bitFrequencyHz
|
protected |
Definition at line 138 of file TxDriverCommon.h.
◆ _byteBuffer
|
protected |
Definition at line 135 of file TxDriverCommon.h.
◆ _codec
Definition at line 133 of file TxDriverCommon.h.
◆ _frameSize
|
protected |
Definition at line 136 of file TxDriverCommon.h.
◆ _framingMode
|
protected |
Definition at line 137 of file TxDriverCommon.h.
◆ _pin
|
protected |
Definition at line 141 of file TxDriverCommon.h.
◆ _protocol
|
protected |
Definition at line 134 of file TxDriverCommon.h.
◆ _useChecksum
Definition at line 139 of file TxDriverCommon.h.
◆ check_sum
|
protected |
Definition at line 140 of file TxDriverCommon.h.
◆ isPreambleSent
Definition at line 142 of file TxDriverCommon.h.
The documentation for this class was generated from the following file:
- src/pulse/TxDriverCommon.h